MR-JE-10A三菱伺服驱动器100W增量式
| MR-JE-A(通用接口)规格 | |||
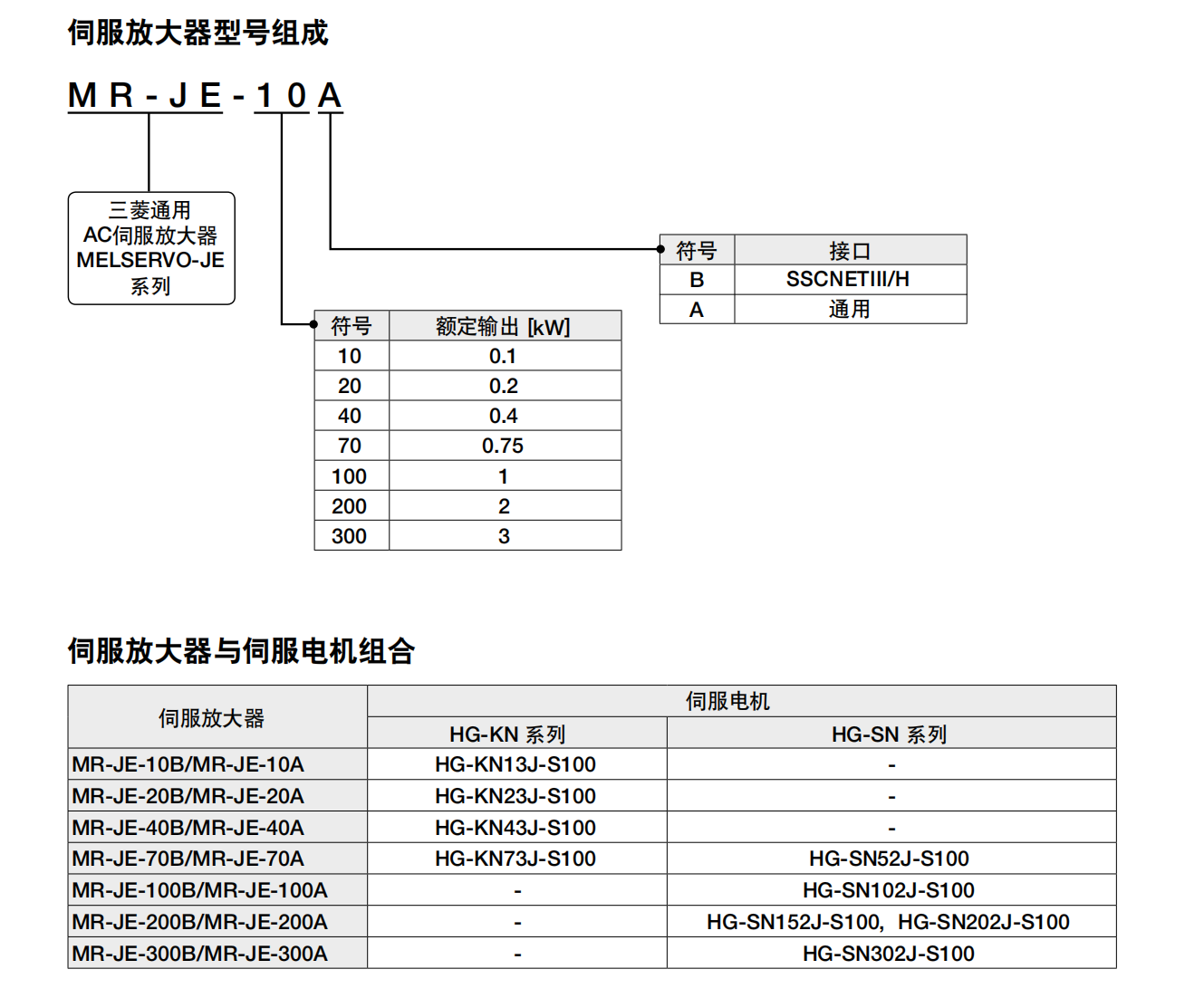
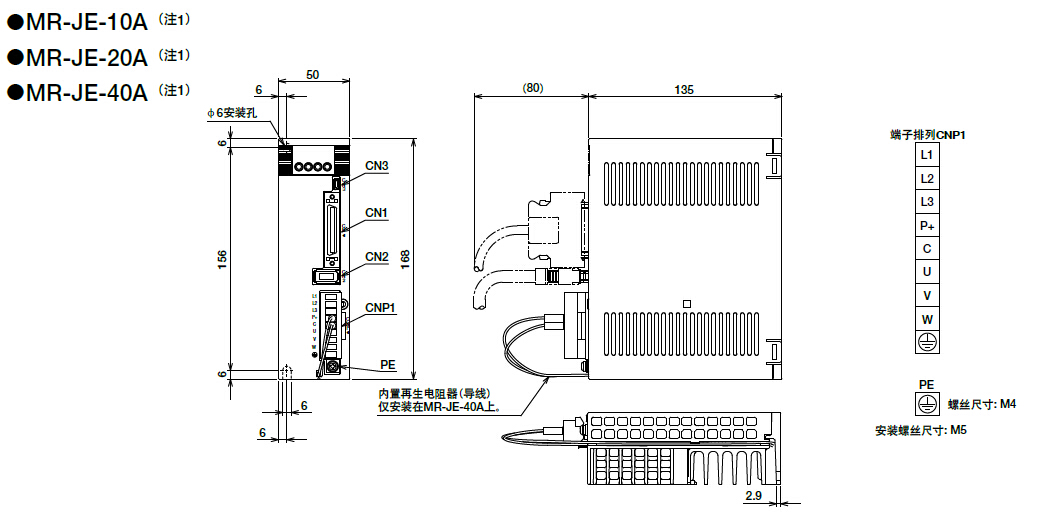
| 伺服放大器型号 | MR-JE-10A | ||
| 输出 | 额定电压 | 三相AC170V | |
| 额定电流[A] | 1.1 | ||
| 电源输入 | 电压、频率(注) | 三相或单相AC200V~240V,50Hz/60Hz | |
| 额定电流(注刀[A] | 0.9 | ||
| 允许的电压变动 | 三相或单相AC170V~264V | ||
| 允许频率变动 | ±5%以内 | ||
| 接口用电源 | DC24V±10%(必要电流容量:0.3A) | ||
| 控制方式 | 正弦波PWM控制、电流控制方式 | ||
| 伺服放大器内置再生电阻器的容许 再生电力硅2,3) |
[W] | - | |
| 动态制动器 | 内置 | ||
| 通信功能 | USB:连接个人电脑等(MRConfigurator2对应) | ||
| 编码器输出脉冲 | 对应(ABZ相脉冲) | ||
| 模拟量监视器 | 2ch | ||
| 位置控制 模式 |
最大输入脉冲频率 | 4Mpps(差分脉冲时)、200kpps(集电极开路时) | |
| 定位反馈脉冲 | 编码器分辨率(伺服电机每转的分辨率):131072pulses/rev | ||
| 指令脉冲倍率 | 电子齿轮A/B倍A=1~16777215、B=1~16777215、1/10<A/B<4000 | ||
| 定位到位范围设定 | Opulse~±65535pulses(指令脉冲单位) | ||
| 误差过大 | ±3转 | ||
| 转矩限制 | 参数设定或外部模拟量输入设定(DCOV~+10V/最大转矩) | ||
| 速度控制 模式 |
速度控制范围 | 模拟量速度指令1:2000、内部速度指令1:5000 | |
| 模拟量速度指令输入 | DCOV~±10V/额定转速(可用[Pr.PC12]更改10V时的转速) | ||
| 速度变动率 | ±0.01%以下(负载变动:0%~100%)、0%(电源变动:±10%) ±0.2%以下(环境温度:25℃±10℃)仅限模拟量速度指令时 |
||
| 转矩限制 | 参数设定或外部模拟量输入设定(DCOV~+10V/最大转矩) | ||
| 转矩控制 模式 |
模拟量转矩指令输入 | DCV~±8V/最大转矩(输入阻抗:10kΩ~12kQ) | |
| 速度制限 | 参数设定或外部模拟量输入设定(DCOV~±10V/额定转速) | ||
| 伺服功能 | 高级振动抑制控制I、自适应滤波器IⅡ、鲁棒滤波器、自动调谐、一键式调整、 TOUGHDRIVE功能、驱动记录仪功能、设备诊断功能、电力监视功能 |
||
| 保护功能 | 过电流断路、再生过电压断路、过负载断路(电子热继电器)、 伺服电机过热保护、编码器异常保护、再生异常保护、欠电压保护、 瞬时停电保护、过速保护、误差过大保护 |
||
| 结构(防护等级) | 自冷、开放(IP20) | ||
| 紧密安装 | 可住5 | ||
| 环境条件 | 环境温度 | 运行:0C~55C(无冻结)、保存:-20C~65C(无冻结) | |
| 环境湿度 | 运行/保存:90%RH以下(无结露)、保存90%RH以下(无结露) | ||
| 空气条件 | 室内(无阳光直射),无腐蚀性气体、可燃性气体、油雾及灰尘的场所 | ||
| 海拔 | 海拔1000m以下 | ||
| 振动 | 5.9m/s²、10Hz~55Hz(X,Y,Z各方向) | ||
| 重量[kg] | 0.8 | ||
伺服驱动器,三菱伺服电机,三菱伺服电机官网,三菱伺服驱动器报警,三菱伺服故障代码,MR-JE-10A,MR-JE-10A说明书,MR-JE-10A驱动器参数,MR-JE-10A接线,MR-JE-10A伺服驱动器,MR-JE-10A伺服驱动器接线图
넶浏览量:0
-
品牌三菱
-
产品名称伺服系统
-
电压三相220V
-
产地中国

















































- 型号规格
参考价:
¥
980.00
MR-JE-10A 三菱伺服驱动器 100W 具有以下一些优点和用途:
优点:
1. 高精度控制:能够实现精确的位置、速度和转矩控制,满足对运动精度要求较高的应用。
2. 响应快速:具有较短的响应时间,能够快速跟随指令变化,提高系统的动态性能。
3. 稳定性好:在运行过程中能够保持稳定的性能,减少误差和波动。
4. 节能高效:优化的驱动算法和控制方式有助于提高能源利用效率,降低能耗。
5. 易于调试和编程:配备了友好的调试界面和编程工具,方便用户进行参数设置和程序开发。
6. 可靠性高:采用优质的电子元件和先进的制造工艺,具有较高的可靠性和耐用性。
用途:
1. 工业自动化设备:如数控机床、自动化生产线、机器人等,实现精确的运动控制。
2. 电子制造设备:例如贴片机、插件机等,确保高精度的组装操作。
3. 印刷包装设备:保证印刷和包装过程中的准确位置和速度控制。
4. 医疗设备:如医疗影像设备、手术机器人等,提供精确和稳定的运动支持。
5. 科研实验设备:满足科研领域对精确运动控制的需求。
优点:
1. 高精度控制:能够实现精确的位置、速度和转矩控制,满足对运动精度要求较高的应用。
2. 响应快速:具有较短的响应时间,能够快速跟随指令变化,提高系统的动态性能。
3. 稳定性好:在运行过程中能够保持稳定的性能,减少误差和波动。
4. 节能高效:优化的驱动算法和控制方式有助于提高能源利用效率,降低能耗。
5. 易于调试和编程:配备了友好的调试界面和编程工具,方便用户进行参数设置和程序开发。
6. 可靠性高:采用优质的电子元件和先进的制造工艺,具有较高的可靠性和耐用性。
用途:
1. 工业自动化设备:如数控机床、自动化生产线、机器人等,实现精确的运动控制。
2. 电子制造设备:例如贴片机、插件机等,确保高精度的组装操作。
3. 印刷包装设备:保证印刷和包装过程中的准确位置和速度控制。
4. 医疗设备:如医疗影像设备、手术机器人等,提供精确和稳定的运动支持。
5. 科研实验设备:满足科研领域对精确运动控制的需求。